Führungslose Schweißroboter, Kletterroboter für Schweißarbeiten
Die führungslosen Schweißroboter arbeiten in allen Positionen (1G-6G) und können zum Schweißen von Großbauteilen eingesetzt werden, wie z.B. Strukurteile, Drucktanks und Aufbewahrungstanks in der Öl-, Gas- und Atomindustrie, auf Bohrplattformen, im Schiffbau und für Bauarbeiten. Diese Kletterroboter benötigen keine Führungsschienen, bewegen sich besonders flexibel und dank optischer Lasersensoren und präziser Kontrolle der Schweißnähte arbeiten sie besonders autonom und verbessern Schweißvorgänge im Vergleich zu herkömmlichen halbautomatischen und manuellen Handschweißmaschinen.
Haben Sie Fragen zu unseren Kletterrobotern?
Kontaktieren Sie unsere Experten für eine ausführliche Beratung.
- Raupenkette
- Optische Lasersensoren
- Windschutz
- Automatische Neigung für verschiedene Schweißpositionen
- Tragevorrichtung
- Permanente Haftmagneten in den Raupenketten
- Unerfahrene Schweißer können bereits nach einer 3-tägigen Schulung diese Kletterroboter bedienen, sodass weniger Maschinenbediener und weniger Fähigkeiten benötigt werden.
- Keine Führungsschienen oder Programmierungen nötig.
- Stabile und zuverlässige Schweißqualität und dadurch stark reduzierter Ausbesserungsbedarf.
- Langwellen- und Doppelpuls-Schweißverfahren, hohe Schweißgeschwindigkeit und Effizienz.
- Schweißvorgänge aus dem Speicher direkt verfügbar
- Hohe Ladekapazität, bewegt sich flexibel, arbeitet in allen Positionen, kann klettern und sich um die eigene Achse drehen (Schweißarbeiten an Großbauteilen)
- Keine Hindernisse einfach überwinden
- Fernsteuerung über Schaltkasten und Überwachungskamera über den Raupenketten, um Schweißnaht zu kontrollieren
- Stabiles Design für lange Lebensdauer
- 4 Ultraschallsensoren, die Fall und Sturz vermeiden;
- Werkstücke: Aufbewahrungstanks, Kugeltanks, Schiffe, Großbauteile in der Atomkraft und mehr
- Metallarten: Karbonstahl und Aluminiumlegierungen
- Schweißnähte: V,X,U,J
- Schweißpositionen:1G,2G,3G,4G, 5G,6G
- Metaldicke: 6mm bis 100mm
Alle Bestandteile des Schweißsystems sind auf einem Fahrgestell montiert, einschließlich Kletterroboter, Schaltkasten, Netzteil, Drahtzuführung und Wasserkühler - einfache Bedienung und effizienter Transport garantiert.
- Fahrgestell
- Schaltkasten
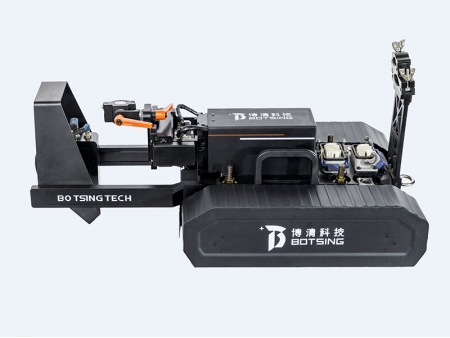
- Führungsloser Schweißroboter
- Drahtzuführung
- Wasserkühler
- Netzteil/Schweißinverter
- Maße: 400(L)mmx800mm(W)xl500mm(H)
- Fahrweise: Elektrisch/manuell
Der Schaltkasten ist modular designt, hat ein Metallgehäuse und Touch-Screen-Display. Die Hochleistungs-CPU nutzt Multiprozessoren, sodass schnelle und synchrone Vorgänge ermöglicht werden, damitsich der Kletterroboter effizient bewegen und schweißen kann. Ein Servoregler ist im Schaltkasten integriert und alle Achsen des Kletterroboter können über das Touch-Screen einzeln gesteuert werden. Der Schaltkasten ist flexibel designt und lässt sich in verschiede Industriesysteme integrieren.
| Maße | 580mm (L) x360mm (W) x630mm (H) |
| Schnittstellen | Analoge Schnittstelle: 4 I/O Schnittstelle: 32 I/O Digitale |
Eine Kamera mit max. Sichtweite von 100m ist direkt am Schmelzbad angebracht, um den Schweißvorgang perfekt zu überwachen. Ein Dynamikbereich von 140 dB wird durch fortschrittliche Sensorentechnolgie und präzises Stromkreisdesign ermöglicht. Maschinenbediener können den Lichtbogen, Drahtzuführung und den gesamten Schweißvorgang in Echtzeit beobachten.
| Bildsensor | 2/3" Farbe oder HDR CMOS |
| Auflösung | 1280(H) X1024(V) |
| Pixelgröße | 6.8μm X 6.8 μm (8.7mm X 7mm effektiver Bereich) |
| Filter | blocks UV IR |
| Bildersensor Verschluss | global oder rollend |
| Dynamikbereich | 140 dB |
| Pixeltiefe | 8bit |
| Belichtungszeit | 100μs - 100ms |
| Bildkontrolle | Verschlussdauer kontrolliert Belichtungszeit |
| Maße | ohne Objektiv) 85mm (L) X36.5mm(W) X38.5mm (H) ( |
| Gewicht | 200g (ohne Objektiv) |
| Objektivfassung | C Fassung |
| Energieverbrauch | 6W bei 12V |
Schweißinverter können je nach Kundenanforderungen angepasst werden. Die Standardinverter sind aus der Digital-Serie und nutzen 200 eingespeicherte Schweißprogamme. So können Schweißmaterial, Drahtdurchmesser und Schutzgas stets exakt adjustiert werden.
| Stromstärke beim Schweißen | BQT-I-400A | BQT-I-500A | |
| Nennstrom 50/60hz | 400v( 20%/-20%) | ||
| Nennspannung | 25A | 28.5A | |
| Leistungsfaktor bei max. Spannung | 0.96 | 0.93 | |
| Effizienz bei max. Spannung | 0.89 | 0.89 | |
| Aussteuergrad@40℃ | 100% | 420A | 500A |
| 60% | 350A | 450A | |
| Aussteuergrad@25℃ | 100% | 420A | 500A |
| Spannungsbereich (MIG/MAG) | 15A-420A | 15A-500A | |
| Gewicht | 34KG | 40KG | |
| Maße | 738mm(L) *273mm(W) *521mm(H) | ||
Die Drahtzuführung hat ein Metallgehäuse für besondere Widerstandskraft. Es können 99 verschiedene Schweißprogramme gespeichert werden, sodass sie flexibel für unterschiedliche Anwendungen eingesetzt werden kann.
| Modell | DVU W500 |
| Gewicht | 16kg |
| Dimensions | 603mm(L)x262mm(B)x446mm(H) |
| Drahtrollen | 4 |
| Drahtdurchmesser | 0.6 mm-1.6 mm |
| Zuführungsrate | 0-25 m/min |
| Spulendurchmesser | 300mm |
| Produktgewicht | 28.8kg | Max. Hindernishöhe | 5mm |
| Max. Beladung | 60kg | Max. Geschwindigkeit | 5m/min |
| Min. Durchmesser gekrümmter Oberflächen | ≥3.2m | Genauigkeit Schweißnahtkontrolle | ±0.5mm |
| Maße | 621 mm (L) x394mm (W)x267mm (H) | ||
| Fortbewegung | Raupenketten | Schweißpositionen | linear, Pendelschweißen, angewinkelt |
| Bewegungsrate beim Linearschweißen | ±25mm | Wulst/Nut | ±25mm |
| Abschrägung bei Pendelschweißen | ±30° | Winkel beim Schweißen | ±10° |
| Brennwinkel | ±30° | Drehung | Komplettdrehung 360° |
| Working temperature | -10℃~40℃ | Relative humidity | below 90% |
| Control cable | 10m standard length; extended length available upon request | ||
Heutzutage werden häufig Großbauteile noch per Hand oder haltautomatischer Schweißgeräte verschweißt. Diese Prozesse gehen oft mit vielen versteckten Kosten einher. Professionelle Schweißer unterlaufen langen, kostspieligen Ausbildungen um qualitativ hochwertige Schweißarbeiten durchführen zu können. Fehler sind jederzeit möglich und können die Produktionszeit verlängern und Kosten steigern. Außerdem sind Schweißarbeiten extrem ungesund und können gefährlich sein, da Schweißer ständig Blitzen, Funken, Rauch und Hitze ausgesetzt werden. Halbautomatische Schweißvorgänge an Großbauteilen sind nur durch Führungsschienen möglich, was Schweißarbeiten an gekrümmten und unregelmäßigen Flächen extrem umständlich macht. Die führungslosen Kletterroboter hingegen bieten hier die optimale Alternative zu den herkömmlichen Schweißvorgängen an. Daher eignen sich die Kletterroboter perfekt für Schweißarbeiten an Großbauteilen in der Bauindustrie und garantieren höchste Qualität und Effizienz.
- Inkonsistente Qualität der Schweißnähte
- Wenig Effizienz
- Höhere Arbeitskosten
- Pneumokoniose (Staublunge)
- Sicherheitsrisiko
- Hohe Managementkosten
- Führungsschienen werden benötigt
- Nicht möglich bei gekrümmten oder ungleichmäßigen Oberflächen (z.B. Rohre, Kugeltank etc.)